 L'élimination des tumeurs de l'oreille interne est une tâche délicate: les médecins doivent généralement enlever l'os temporal entier. À l’avenir, un tunnel de largeur 5 de 1 mm passera à travers l’os, ce que le mini-robot "Niliboro" de Fraunhofer Mills. Pour les zones sensibles telles que les vaisseaux sanguins et les nerfs, il en fait un grand arc. Les coussins gonflables fixent le robot pendant l'opération. Premièrement, les chercheurs développent la géométrie de poche optimale avec plusieurs prototypes.
L'élimination des tumeurs de l'oreille interne est une tâche délicate: les médecins doivent généralement enlever l'os temporal entier. À l’avenir, un tunnel de largeur 5 de 1 mm passera à travers l’os, ce que le mini-robot "Niliboro" de Fraunhofer Mills. Pour les zones sensibles telles que les vaisseaux sanguins et les nerfs, il en fait un grand arc. Les coussins gonflables fixent le robot pendant l'opération. Premièrement, les chercheurs développent la géométrie de poche optimale avec plusieurs prototypes.
Diagnostic de la tumeur de l'oreille interne - il n'y a aucun moyen de contourner une opération. Cependant, l’oreille interne n’est pas facilement accessible: elle est recouverte d’un os du crâne crânien appelé mastoïde, également appelé os pétreux. En outre, de nombreux vaisseaux sanguins et nerfs traversent les tissus environnants. Les docteurs broyent tellement d'os mastoïde qu'ils ont dépisté chacune de ces structures sensibles. C'est la seule façon pour eux de s'assurer de ne pas leur nuire. Cela signifie principalement que les médecins doivent retirer l'os complet. Le trou résultant est rempli de tissu adipeux de l'abdomen après une intervention chirurgicale.
Opérant dans un petit tunnel
À l’avenir, cette opération devra être effectuée avec plus de douceur: puis un petit trou de 5 en mm de diamètre suffit à couper la tumeur de l’oreille interne. Il est rendu possible par le Niliboro (robot de forage non linéaire), chercheur du groupe de projet Mannheim pour l'automatisation en médecine et biotechnologie de l'Institut Fraunhofer pour l'ingénierie de la fabrication et l'automatisation IPA, en collaboration avec ses collègues de l'Université technique de Darmstadt, de l'Université d'Aachen et de l'hôpital universitaire de Düsseldorf.
Bien qu'il existe déjà des forets capables de fraiser un tunnel dans un os - mais ils ne font leur chemin que dans un mort. "Pour la première fois, Niliboro peut creuser des angles serrés", déclare Lennart Karstensen, scientifique du groupe de projet. Cette propriété est ce qui rend possible la chirurgie mini-invasive des tumeurs de l'oreille interne. Car si le tunnel venait de courir, il viendrait ici et là les nerfs se fermeraient dangereusement. Afin de ne pas les blesser, le diamètre du tunnel ne doit pas être supérieur à un à 2 mm. Cependant, vous ne pouvez pas opérer à travers un si petit trou. Niliboro, en revanche, est capable de se plier autour de zones délicates, de sorte que le tunnel puisse avoir une largeur de 5. Assez large pour faire la chirurgie.
Les lignes hydrauliques font avancer le ver du robot
Mais comment le ver parvient-il à se frayer un chemin à travers les os et autour des coins à travers l'os mastoïde? "Le ver se compose d'une tête et d'une queue", explique Karstensen. »Ces deux parties sont reliées de manière flexible via un soufflet.« La structure rappelle un bus extra-long, dans lequel les parties avant et arrière sont couplées par une construction en forme de tuyau qui ressemble à un accordéon.
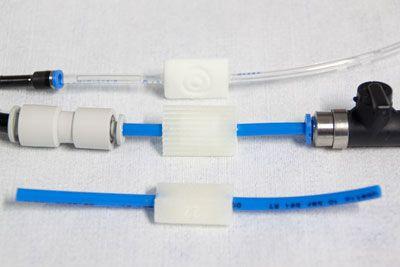
Lors de son passage dans l'os, le robot est connecté via 8 aux conduites hydrauliques 12 avec le monde extérieur, à savoir les dispositifs de contrôle et les pompes dans la salle d'opération. Ces lignes lui permettent de ramper dans la bonne direction: d’abord, elles pompent le fluide hydraulique dans trois coussins situés à l’arrière. Les coussins remplissent l'espace entre le ver et les os et fixent ainsi la partie arrière du mini-robot. Maintenant, le liquide coule dans le soufflet: "l'accordéon" se déplie et pousse la tête vers l'avant. Le ver s'étire littéralement et déplace sa partie antérieure plus loin dans l'os.
La perceuse, qui est attachée à la tête, trace le chemin librement. Maintenant, la partie arrière est resserrée, comme un ver vivant: pour ce faire, les coussins sont gonflés à la partie avant et maintenus pendant que le fluide hydraulique s'échappe des coussins arrière. Les tuyaux aspirent maintenant aussi le liquide du soufflet. Il se ressaisit et tire la partie arrière derrière lui. Petit à petit, Niliboro avance. »La direction dans laquelle le robot doit se déplacer peut être réglée via les coussins situés sur la partie avant. Si, par exemple, il tourne à gauche, nous remplissons le coussin de gauche moins tendu que les autres et le robot s’incline du côté gauche ", explique Karstensen.
Premier prototype développé
En laboratoire et plus tard dans la salle d'opération, le chemin que Niliboro est en train de suivre est étroitement surveillé: via un système de suivi électromagnétique, EMT en abrégé, développé par des collègues de la Technische Universität Darmstadt. De plus, un tomographe informatisé prend des photos et vérifie la position de manière sporadique.
Les chercheurs ont déjà construit un premier prototype. Il est actuellement cinq fois plus gros que la version finale prévue. Pour le moment, il ne se compose que de la partie avant et du soufflet, donc du cœur. Peu à peu, les scientifiques veulent optimiser et développer le prototype. Est la technologie complète, Niliboro devrait réduire à sa taille finale. Les chercheurs espèrent que dans deux ans, les médecins pourront tester le mini-robot pour la première fois.